ロボットビジョン、全方位視覚車椅子ロボット、視覚言語情報処理
以下の3つの研究テーマに取り組んでいる。
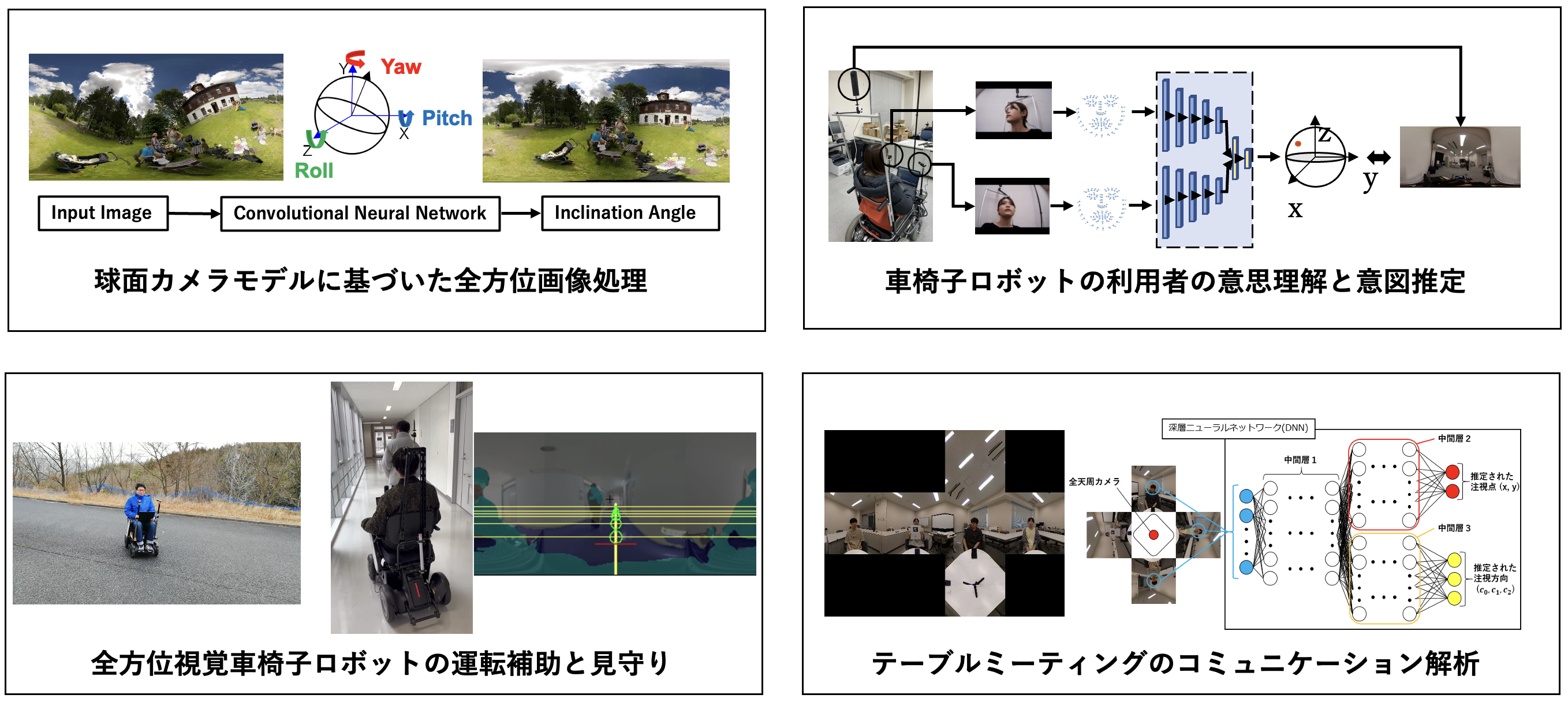
(1)ロボットに視覚を持たせるロボットビジョンに関する研究を行っています。特に、球面カメラモデルに基づいた、360度の視野を持つ全天周画像の解析を行っている。
(2)全方位カメラを搭載した、車椅子利用者と意思疎通を行い利用者の意図を理解しサポートする、相棒のような全方位視覚車椅子ロボットの開発を行っている。